Чаще всего образовательной робототехнике всенаправленную тележку реализуют на колесах двух видов:
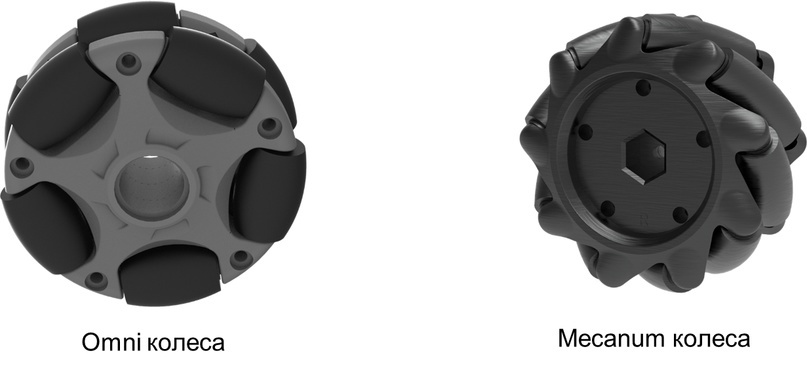
Омни-колеса представляют собой колеса с небольшими дисками (роликами) по окружности, которые перпендикулярны направлению поворота основного колеса робота. В результате колесо может приводиться в движение, в том числе в боковом направлении, с большей легкостью. Кроме того они позволяют нам создавать различные конфигурации всенаправленных тележек, в том числе и трехосевых.
Колеса Mecanum (или колеса Илона) представляют из себя колесо, по периметру которого размещены свободно вращающиеся обрезиненные ролики, наклонённые к оси колеса под углом 45 градусов. Сами колеса при этом не поворачиваются в сторону. Но, вращая четыре таких колеса в разном направлении и с разной скоростью, можно получить любое движение за счет силы трения между полем и установленными под углом роликами. Основным недостатком данных колес является то, что для приведения их в движение требуется больше мощности.
Подключение к mBot2
Вне зависимости от того, какой тип колеса вы выберите, вам необходимо закрепить каждое колесо на моторе и подключить к плате расширения mBot2 shield:

Так как плата расширения mBot2 shield имеет только два порта для подключения энкодерных моторов, нам придется задействовать порты M1 и M2, отключив энкодерную часть от мотора. К сожалению, из-за этого мы лишимся возможности выполнять точные движения в автономном режиме и полностью синхронизировать моторы, но т.к. в данном виде соревнований, ключевую роль играет ручное управление, то можно достичь приемлемых результатов, не используя энкодеры.
Колеса Илона (Mecanum)
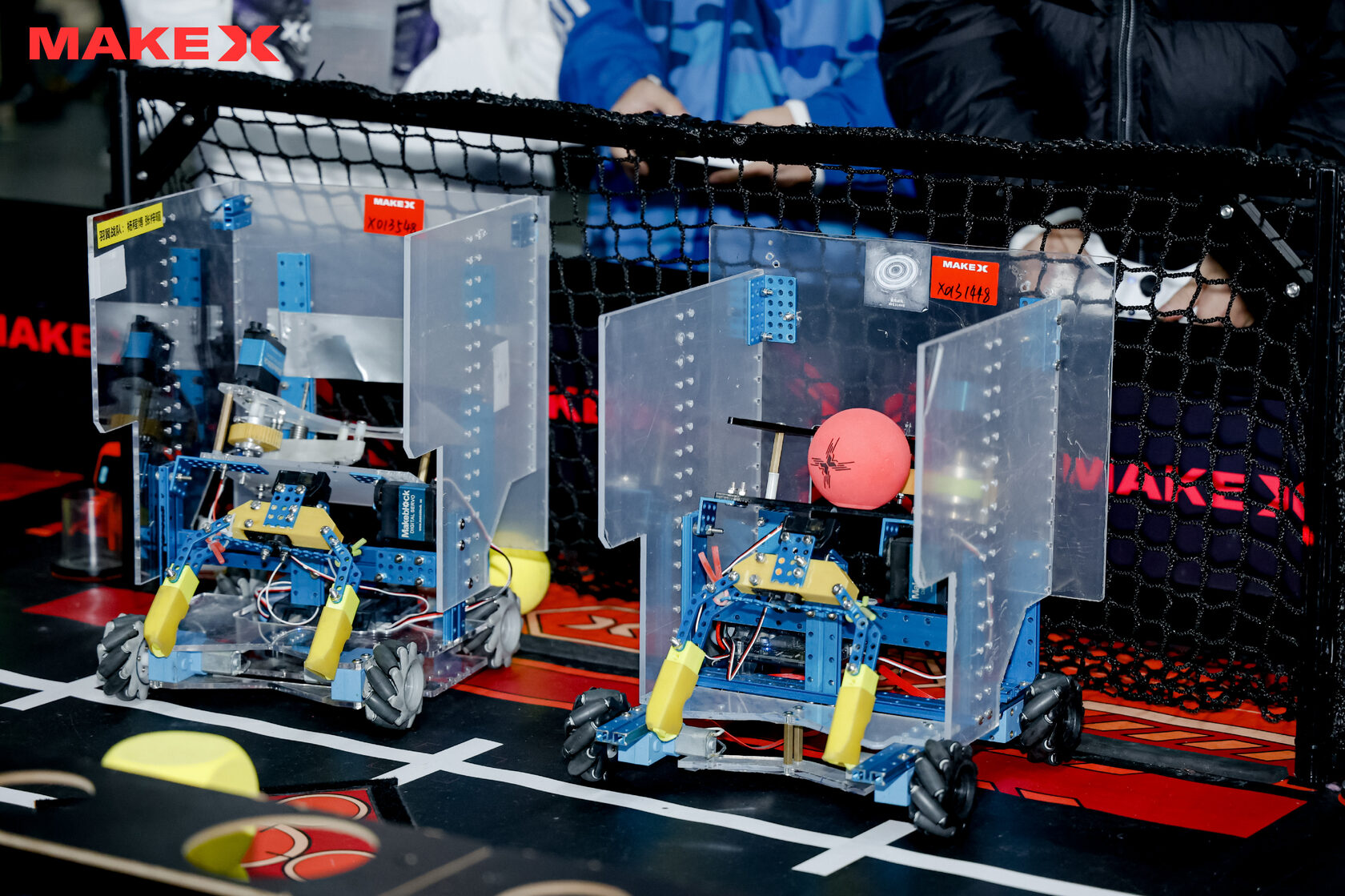
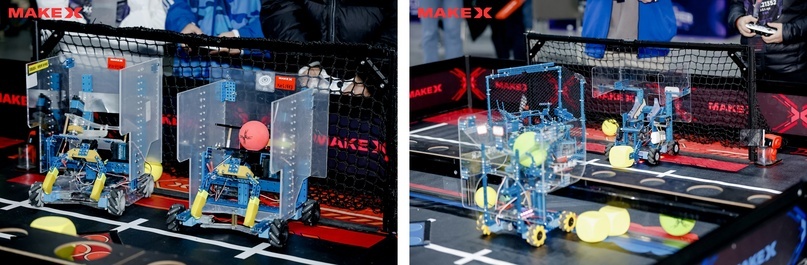
Подавляющее большинство роботов на международных соревнованиях MakeX 2023 в номинации Explorer использовали в своей основе всенаправленную мобильную тележку, т.к. в данных соревнованиях очень важно быстро перемещаться вдоль сетки ворот и центральной балки
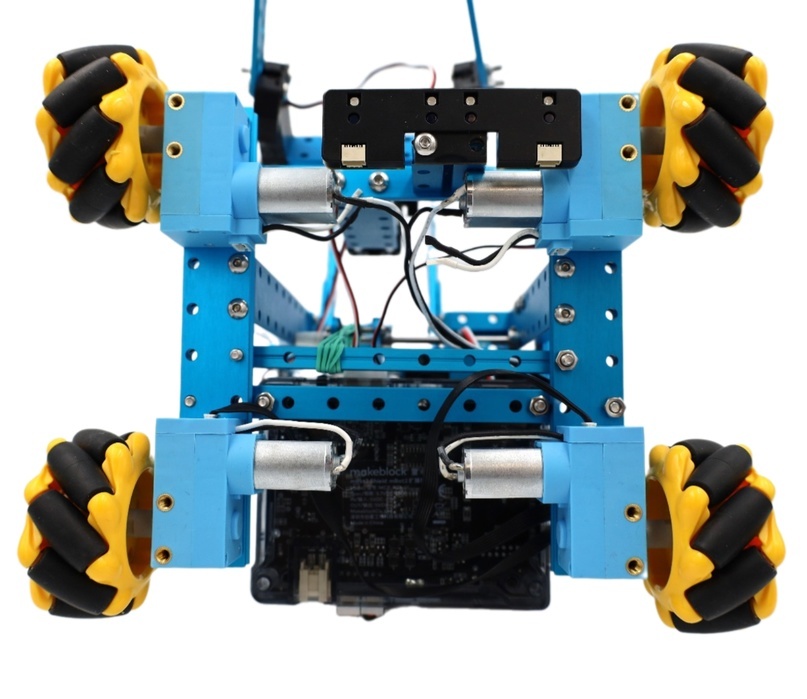
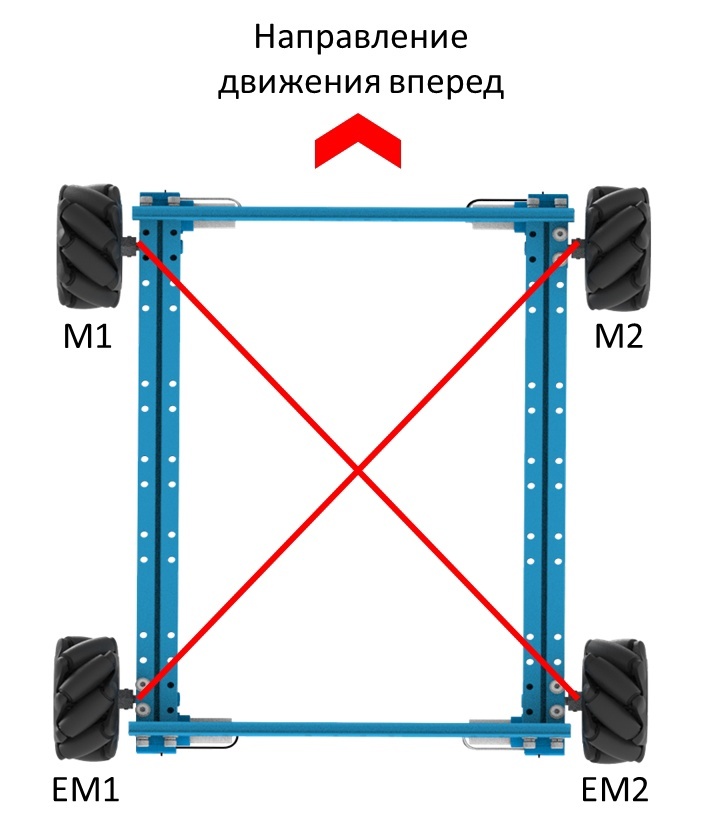
Прежде всего необходимо начать с правильного подключения моторов.
1. Направление осей роликов на колесах должно сходиться в центр робота, образую букву X, легко запомнить MakeX :).
2. В наших программах мы будем использовать вариант подключения, при котором задние моторы подключаются в порты для энкодерных моторов (EM1, EM2), а передние моторы в порты для двигателей постоянного тока (M1 и M2).
Механика движения
Разберемся с механикой движения колес при различных видах движения. На схемах ниже красной стрелкой обозначается направление вращение колеса, оранжевым знаком + и − отмечается знак скорости в блоках независимого движения колес для энкодерных моторов EM1 и EM2, а также двигателей M1 и M2.
Прямолинейное движение робота
Для того, чтобы наш робот двигался по прямой вперед, необходимо, чтобы колеса вращались в одном направлении (вперед).
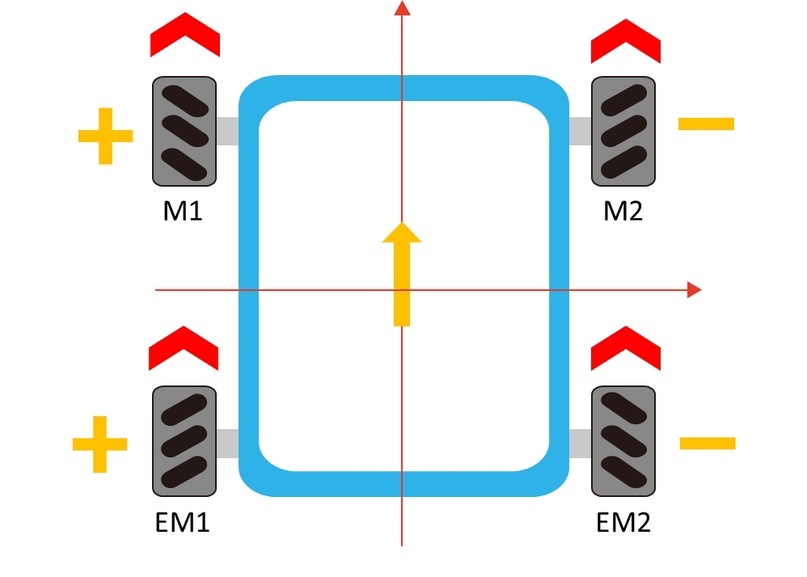
Схема движения вперед

❓Какие значения необходимо поставить в этом блоке, чтобы робот двигался по прямой назад❓
Движение по прямой влево
Для движения по прямой вбок, необходимо, чтобы колеса вращались в реверсивном направлении. При этом они вращаются навстречу друг другу с той стороны, куда необходимо осуществлять движение.
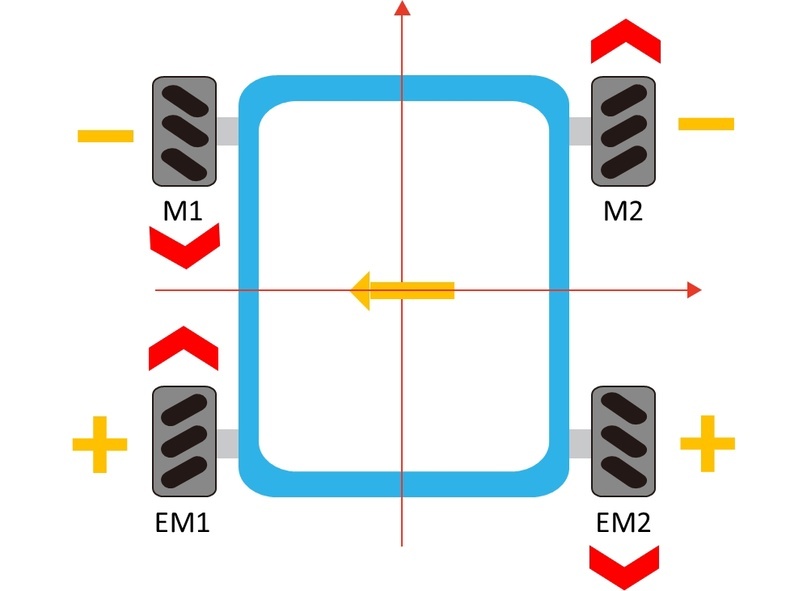
Схема движения по прямой влево

❓Какие значения необходимо поставить в этом блоке, чтобы робот двигался по прямой вправо❓
Разворот на месте
Для разворота на месте необходимо, чтобы колеса с левой и правой стороны вращались в противоположных направлениях с одинаковой скоростью.
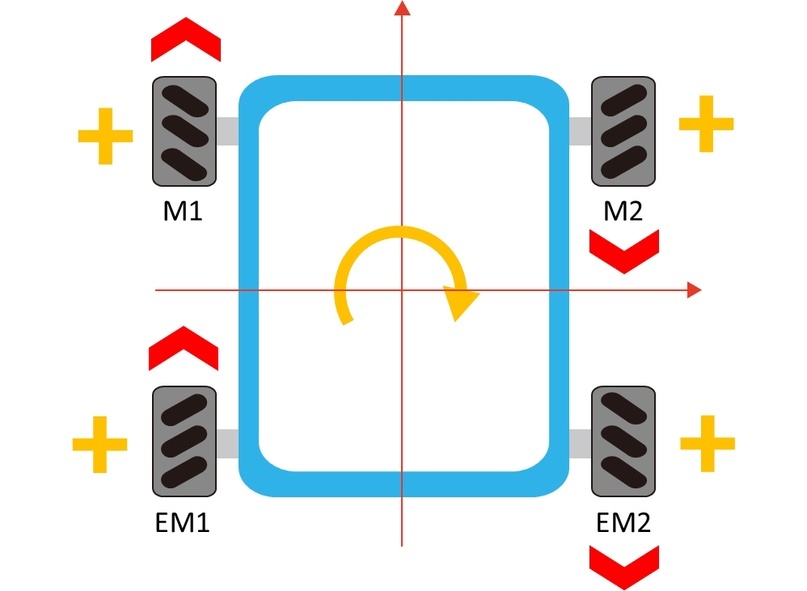
Схема разворота по часовой стрелке

❓Какие значения необходимо поставить в этом блоке для максимально быстрого левого разворота на месте❓
Движение по диагонали вправо
Для движения по диагонали вправо необходимо, чтобы колеса также включались по диагонали.

❓Какие значения необходимо поставить в этом блоке для разворота налево относительно левого колеса❓
Управление с джойстика
Для программирования управления колесами Илона с помощью джойстика необходимо осознать, что движение вперед назад, повороты всем корпусом осуществляются по той же логике, что и управление обычной тележкой.
Реверсивное же движение необходимо отделить от обычного, т.к. логика движения колес несколько иная, вы можете запрограммировать его, например на крестовину.
Также рассмотрим еще один интересный вариант управления, когда реверс включается нажатием на стик.
Обратите внимание, что в коде ниже:
1. Мы разделили управление энкодерными моторами (EM1 и EM2) и двигателей постоянного тока (M1 и M2) в разные блоки событий. Что позволяет уменьшить задержку между стартом этих команд.
2. При этом при реверсивном движении мы не только проверяем нажатие на левый стик, но также проверяем, что правый стик достаточно отклонен, чтобы хватило мощности для старта на реверсивном движении.
Омни-колеса
Омни-колеса позволяют достичь всенаправленного движения с большей легкостью и могут быть установлены в различных конфигурациях.
Крепление омни-колес к мотору
Трехосная мобильная платформа
В данной конфигурации все колеса могут использоваться в качестве ведущих. Для движения могут использоваться два или даже одно колесо, а остальные при этом будут оставаться пассивными.
Прямолинейное движение робота
Для движения робота прямо вперед/назад, необходимо, чтобы два соседних колеса вращались в одном направлении.
Прямолинейное движение вбок
Для движения робота по прямой вправо/влево необходимо, чтобы третье колесо вращалось в направлении результирующей скорости двух других.
Прямолинейное движение вбок
Для движения робота по прямой вправо/влево необходимо, чтобы все три колеса вращались в этом направлении.
Регистрация на MakeX Explorer еще открыта, но поспешите: она закроется 9 апреля. По ссылке.