В прошлой статье мы рассмотрели построение всенаправленной тележки на колесах Илона (меканум). всего образовательной робототехнике всенаправленную тележку реализуют на колесах двух видов:
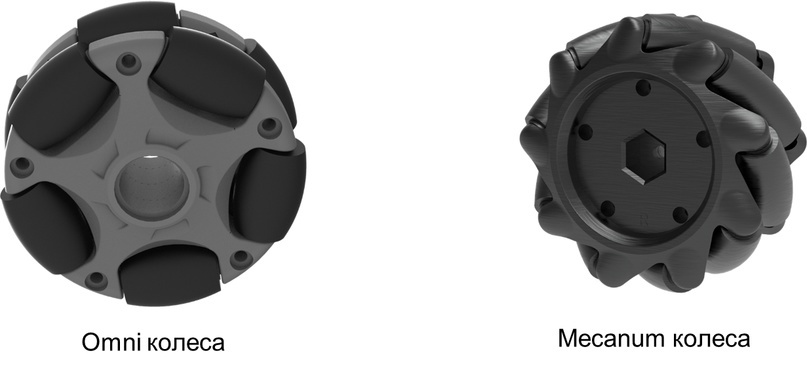
Омни-колеса представляют собой колеса с небольшими дисками (роликами) по окружности, которые перпендикулярны направлению поворота основного колеса робота. В результате колесо может приводиться в движение, в том числе в боковом направлении, с большей легкостью. Кроме того они позволяют нам создавать различные конфигурации всенаправленных тележек, в том числе и трехосевых.
Омни-колеса позволяют достичь всенаправленного движения с большей легкостью и могут быть установлены в различных конфигурациях.
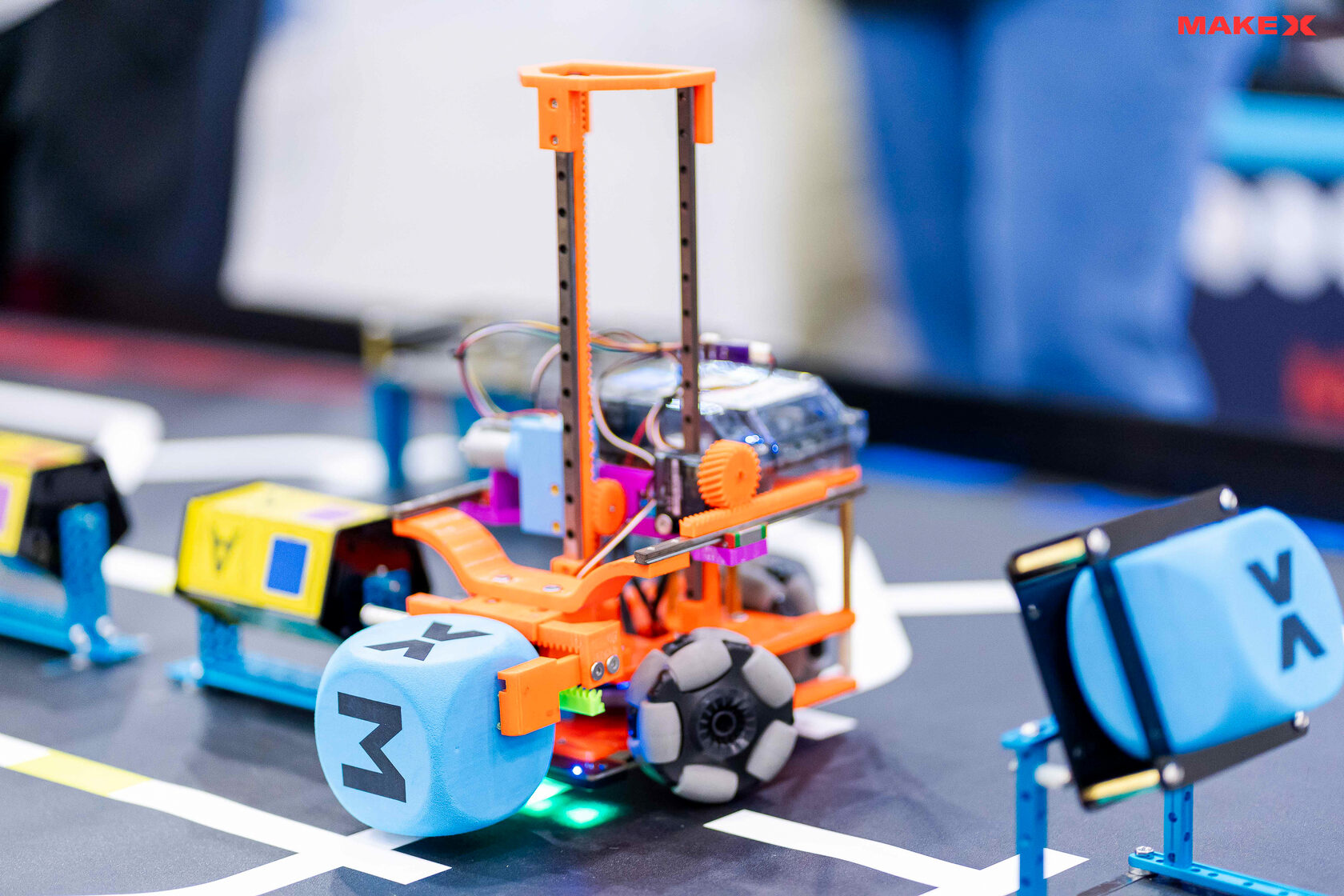
В соревнованиях MakeX Starter сезона 2024-2025 стали появляться роботы на трехосной всенаправленной мобильной тележке. Это позволяет быстро перемещаться вдоль элементов реквизита на арене и выполнять захват и перемещение кубов.
Трехосная тележка выбрана по причине ограничения количества сервоприводов и двигателей до 6. Таким образом, мы можем потратить 3 двигателя, на реализацию шасси, 1 DC-мотор на подъемник, 1 сервопривод на захват и 1 сервопривод на механизм поворота цилиндров.
Трехосная тележка выбрана по причине ограничения количества сервоприводов и двигателей до 6. Таким образом, мы можем потратить 3 двигателя, на реализацию шасси, 1 DC-мотор на подъемник, 1 сервопривод на захват и 1 сервопривод на механизм поворота цилиндров.
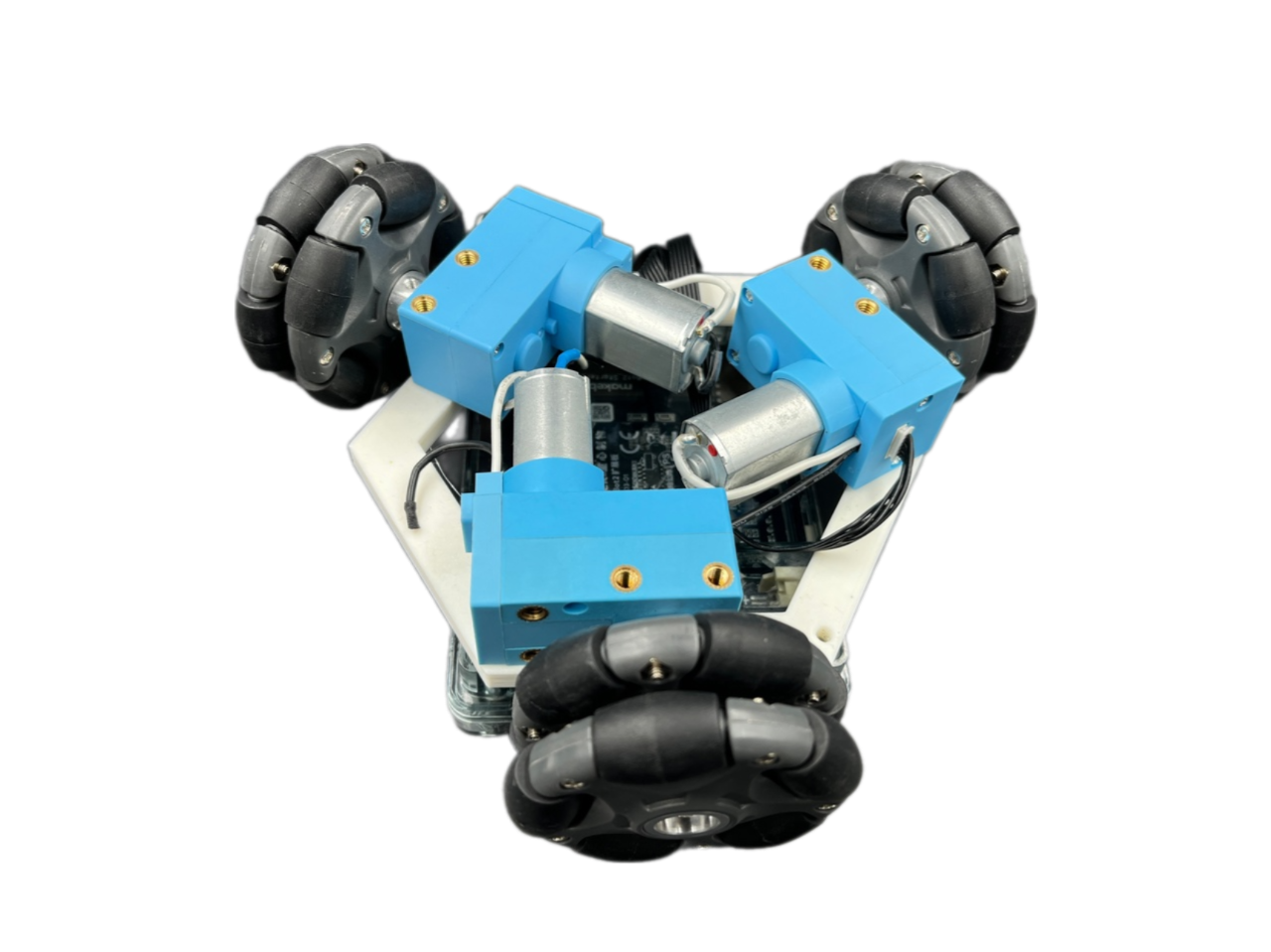
Трехосная мобильная платформа
В данной конфигурации все колеса могут использоваться в качестве ведущих. Для движения могут использоваться два или даже одно колесо, а остальные при этом будут оставаться пассивными.

Подключение к mBot2
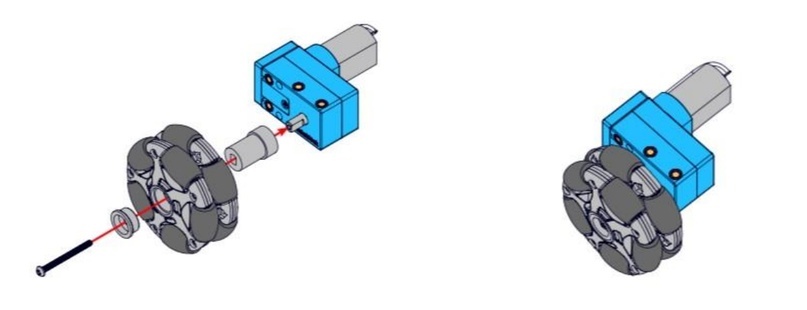
Вне зависимости от того, какой тип колеса вы выберите, вам необходимо закрепить каждое колесо на моторе с помощью переходная, а затем подключить к плате расширения mBot2 shield:
Так как плата расширения mBot2 shield имеет только два порта для подключения энкодерных моторов, нам придется задействовать порты M1 и M2, отключив энкодерную часть от мотора. К сожалению, из-за этого мы лишимся возможности выполнять точные движения в автономном режиме и полностью синхронизировать моторы, но при введении корректирующих коэффициентов для каждого мотора можно добиться приемлемых результатов.
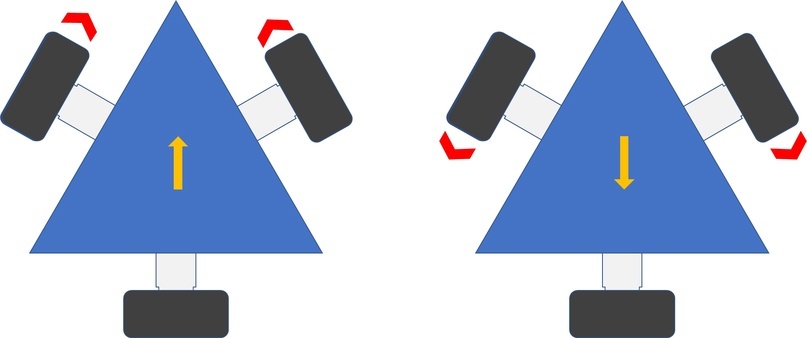
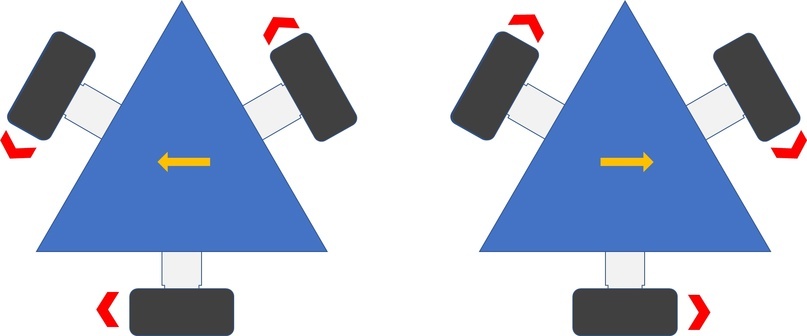
Прямолинейное движение робота
Для движения робота по прямой вправо/влево необходимо, чтобы третье колесо вращалось в направлении результирующей скорости двух других.
Прямолинейное движение вбок
Для движения робота по прямой вправо-влево необходимо, чтобы третье колесо вращалось в направлении результирующей скорости двух других. Т.е. скорость третьего колеса обычно вдвое меньше двух других.

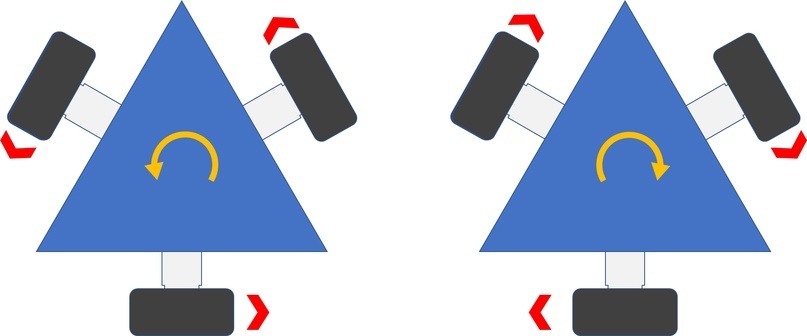
Разворот на месте
Для разворота на месте необходимо, чтобы колеса с левой и правой стороны вращались в противоположных направлениях с одинаковой скоростью.